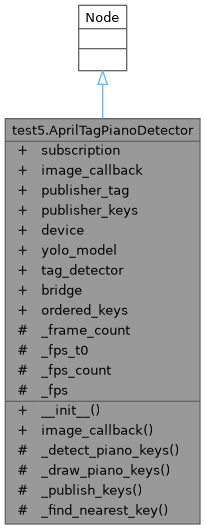
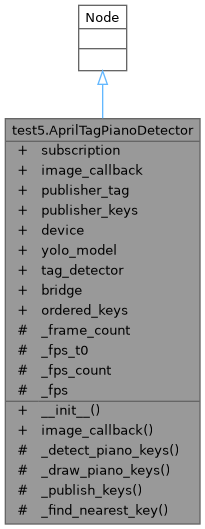
ros 2 node combining apriltag detection with yolo based piano key segmenytation on each incoming image the node: 1) Runs Yolo segmengation and detection to locate piano keys 2) Detects AprilTags 3)Anotate a previw frame and show it in an opencv window.
More...
|
| | __init__ (self) |
| |
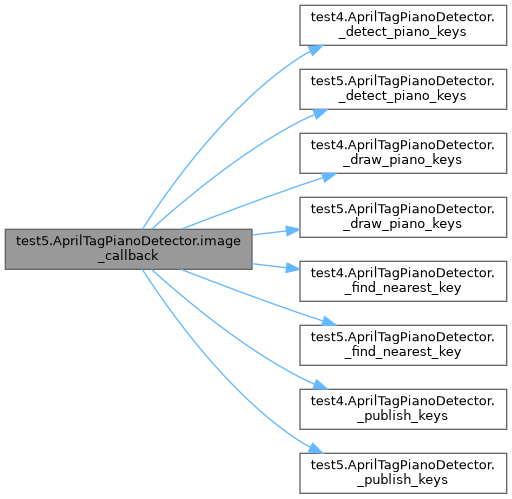
| | image_callback (self, Image msg) |
| | Ros 2 subscriber calback prosses one incoming colour image perfore mthe full detection, annotation and the publish pipeline: 1) convert the Ros image massages to a RGB Numpy array.
|
| |
|
| list | _detect_piano_keys (self, np.ndarray bgr_image) |
| |
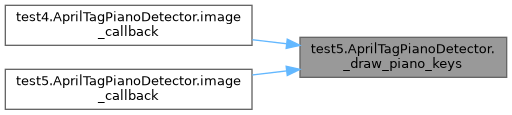
| None | _draw_piano_keys (self, np.ndarray bgr_image, list keys) |
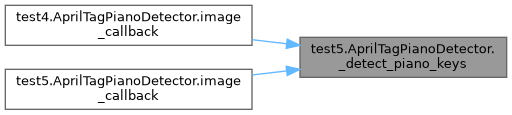
| | Runs yolo interfece on a RGB frame and returns ordere key metdata.
|
| |
| None | _publish_keys (self) |
| | publishing the current ordered_keys list as a poseArray message.
|
| |
| dict|None | _find_nearest_key (self, float px, float py) |
| | returns the key whose adjusted centroid is closest to a query point.
|
| |
ros 2 node combining apriltag detection with yolo based piano key segmenytation on each incoming image the node: 1) Runs Yolo segmengation and detection to locate piano keys 2) Detects AprilTags 3)Anotate a previw frame and show it in an opencv window.
4) publish key poses andtag offsets to downstream node
◆ __init__()
| test5.AprilTagPianoDetector.__init__ |
( |
|
self | ) |
|
◆ _detect_piano_keys()
| list test5.AprilTagPianoDetector._detect_piano_keys |
( |
|
self, |
|
|
np.ndarray |
bgr_image |
|
) |
| |
|
protected |
◆ _draw_piano_keys()
| None test5.AprilTagPianoDetector._draw_piano_keys |
( |
|
self, |
|
|
np.ndarray |
bgr_image, |
|
|
list |
keys |
|
) |
| |
|
protected |
Runs yolo interfece on a RGB frame and returns ordere key metdata.
when the model returns segmentation masks the centroid is computed from the mask poligon moments. otherwise the bounding box center is used.,
keys are sorted left to right by theyer boaunding box x1 cordinate and assigned a sequance key index.
Each return dict has the following fields:, 1) key_index: left to right ordring 2) label: class name from the yolo modle. 3) bbox: [x1, y1, x2, y2] in pixel cordinats 4) contour: Mask polygon points or [] if avalibal 5) mid_x and mid_y: Adjused centroid of x and y after applying the offset 6) confidance: yolo detection confidance score.
- Parameters
-
| bgr_image | Full resolution BGR frame as a Numpy uint8 array. |
- Returns
- List of key dicts sorted by horizontal position
◆ _find_nearest_key()
| dict | None test5.AprilTagPianoDetector._find_nearest_key |
( |
|
self, |
|
|
float |
px, |
|
|
float |
py |
|
) |
| |
|
protected |
returns the key whose adjusted centroid is closest to a query point.
Uses squared euclidean distance with this no sqrt required.
- Parameters
-
| px | Query point x cordinate in pixel space. |
| py | Query point y cordinate in pixel space. |
- Returns
- : The nearest key dict or none if no keys have been detected
◆ _publish_keys()
| None test5.AprilTagPianoDetector._publish_keys |
( |
|
self | ) |
|
|
protected |
publishing the current ordered_keys list as a poseArray message.
each key is encoded as a geometry_msgs/pose where: 1) pose.position.x: adjusted cordinat of x. 2) pose.position.y: adjusted cordinat of y. 3) pose.position.z: 0.0
poses are ordered left to right maching key-index in the source list
◆ image_callback()
| test5.AprilTagPianoDetector.image_callback |
( |
|
self, |
|
|
Image |
msg |
|
) |
| |
Ros 2 subscriber calback prosses one incoming colour image perfore mthe full detection, annotation and the publish pipeline: 1) convert the Ros image massages to a RGB Numpy array.
2)runs Apriltag detection on a greyscale copy. 3) annotates and displayes the preview frame 4)publishes tag offsets and key positions. 5)shuts the node down cleany when the user presses q
param msg sensor_msgs/image massages from the camera topic.
◆ _fps
| test5.AprilTagPianoDetector._fps |
|
protected |
◆ _fps_count
| test5.AprilTagPianoDetector._fps_count |
|
protected |
◆ _fps_t0
| test5.AprilTagPianoDetector._fps_t0 |
|
protected |
◆ _frame_count
| test5.AprilTagPianoDetector._frame_count |
|
protected |
◆ bridge
| test5.AprilTagPianoDetector.bridge |
◆ device
| test5.AprilTagPianoDetector.device |
◆ image_callback
| test5.AprilTagPianoDetector.image_callback |
◆ ordered_keys
| test5.AprilTagPianoDetector.ordered_keys |
◆ publisher_keys
| test5.AprilTagPianoDetector.publisher_keys |
◆ publisher_tag
| test5.AprilTagPianoDetector.publisher_tag |
◆ subscription
| test5.AprilTagPianoDetector.subscription |
◆ tag_detector
| test5.AprilTagPianoDetector.tag_detector |
◆ yolo_model
| test5.AprilTagPianoDetector.yolo_model |
The documentation for this class was generated from the following file: